Soft actuator
Twisted Polymer Fiber (TPF) / Twsited and Coiled Polymer Fiber (TCPF)
The TPF and TCPF are actuators that utilize rotation when heating the twisted polymer fiber.
The TPF output rotation as it is, while the TCPF, which shapes the TPF as the coiling shape, can output the displacement.
These actuators are lightweight, inexpensive, and quiet.
From these characteristics, these actuators are used in robotic applications, e.g., robotic prosthetic limbs.
In this laboratory, we are studying the TCPF and its robotic application.
- Twsited and Coiled Polymer-coated Optical Fiber (TCPF)
-
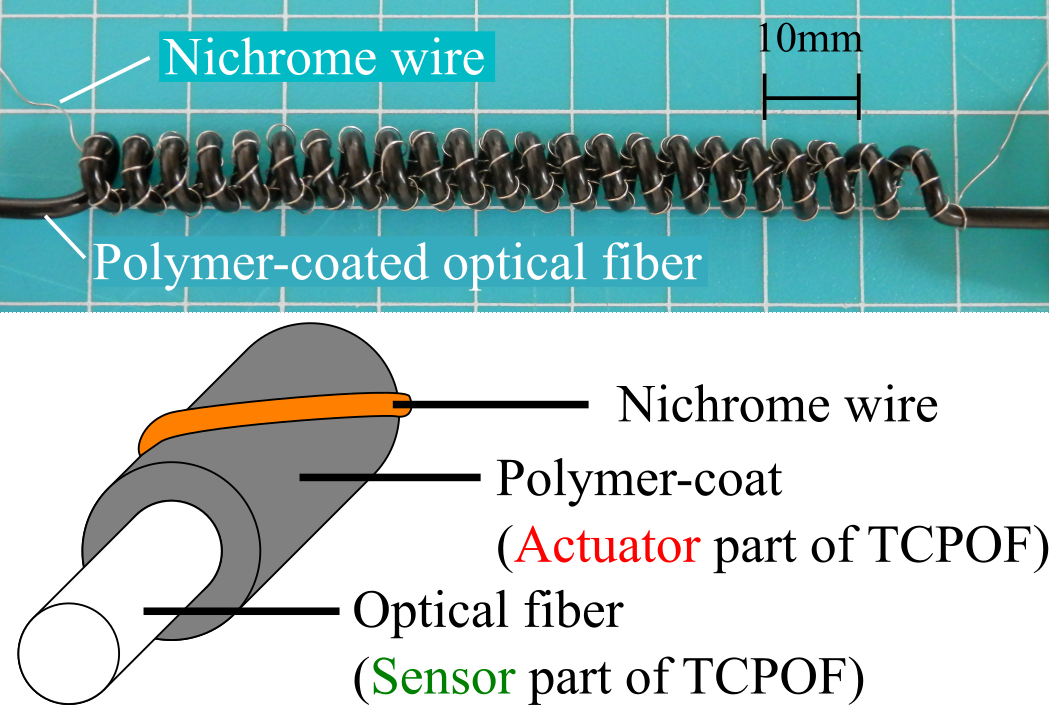
TCPOF is one of the TCPFs that is fabricated by polymer-coated optical fiber. The polymer jacket, in the outer of the TCPOF, works as the TCPF. On the other hand, the optical fiber embedded in the inner side can be used as the sensor. This structure makes the measurement device for the TCPOF temperature and displacement during actuation compact.
- Motion conversion mechanism : Wire-storage pantograph (WISP)
-
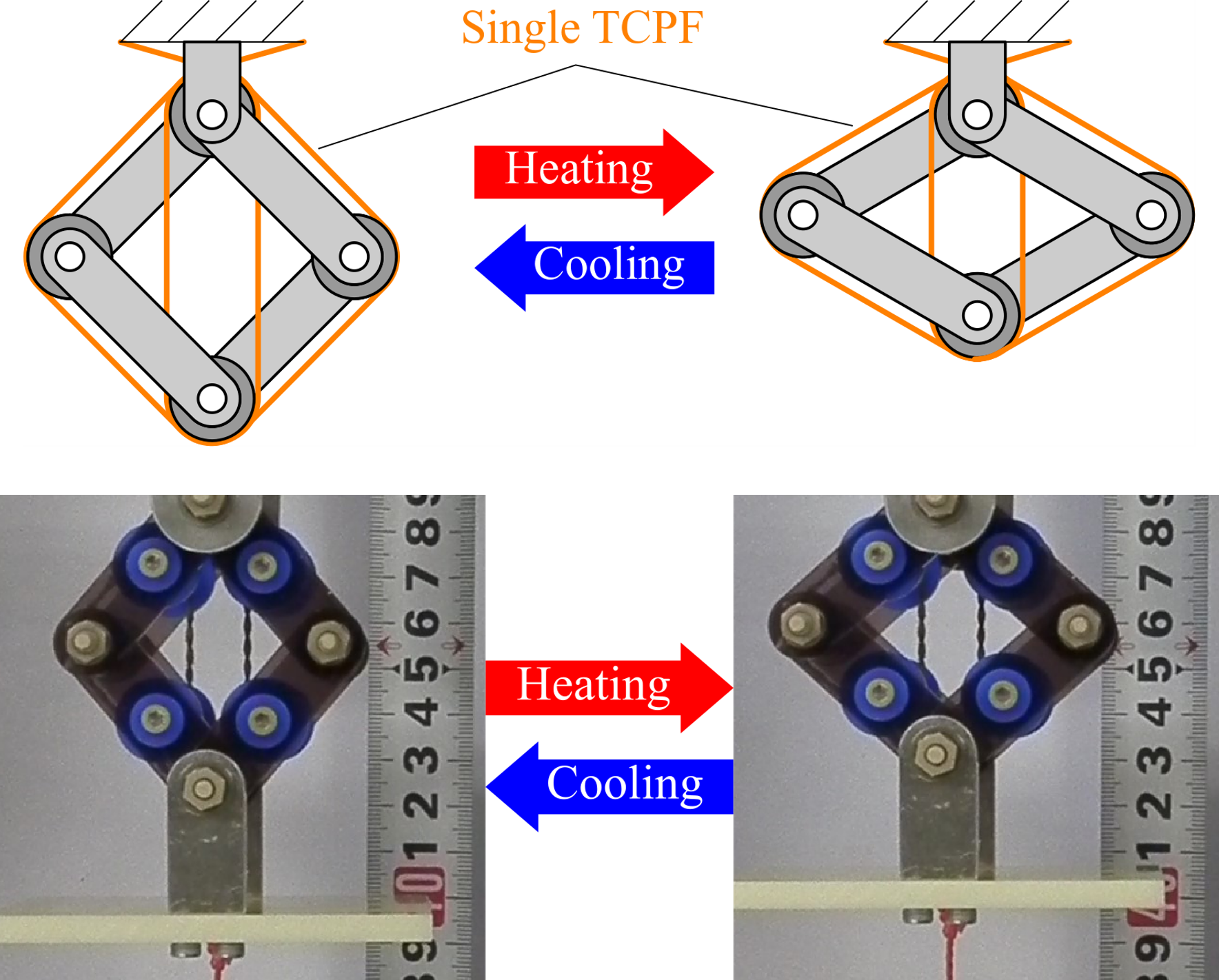
When applying the soft actuator to the robot, it is required to convert the actuator's motion to the desired motion. The WISP, developed in this laboratory, is one of the motion conversion mechanisms suitable for the wire-like soft actuator such as the TCPF. The WISP can amplify the TCPF strain and force by winding the TCPF around the WISP outside and inside.
Wearable robot
Joint mechanism that allow misalignment of attachments
When using the wearable robot, the misalignment of attachment makes the user feel pain or discomfort.
In this laboratory, to resolve this problem, we tackle the development of joint mechanism allowing the misalignment.