ソフトアクチュエータ
高分子繊維アクチュエータ
高分子繊維アクチュエータは,捩った高分子繊維を加熱した際に生じる回転を利用したアクチュエータです.
このアクチュエータは,軽量・安価・静音といった特徴を有しており,ロボット義肢などへの応用が行われています.
本研究室では,この高分子繊維アクチュエータの開発とロボット応用を行っています.
- 高分子被膜付き光ファイバアクチュエータ
-
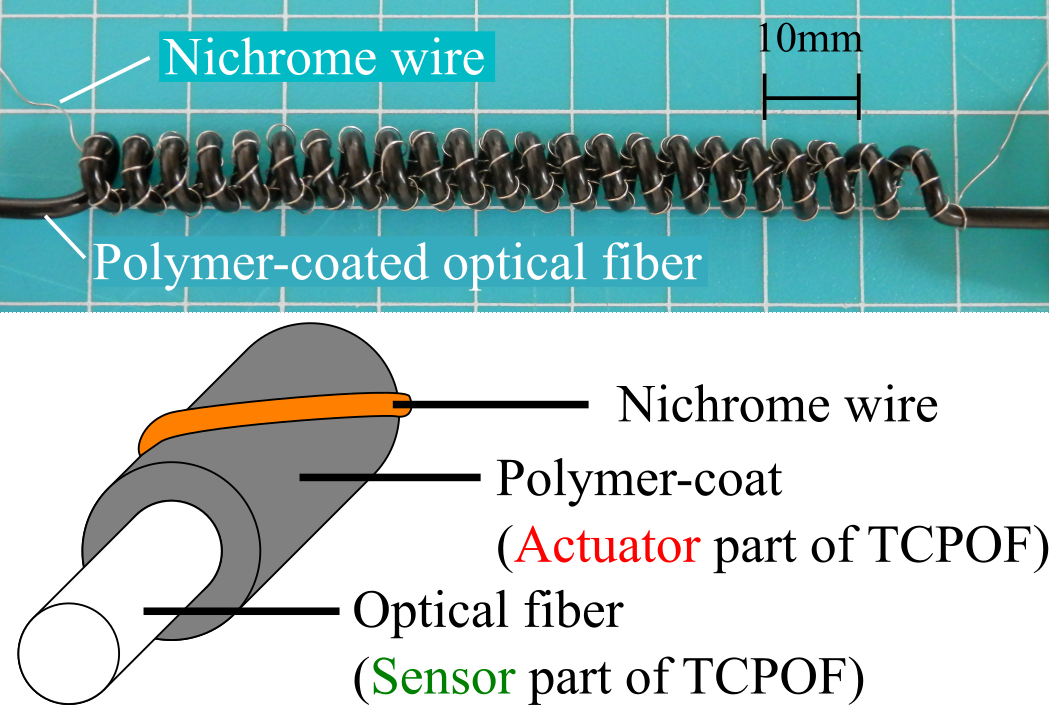
このアクチュエータは,高分子被膜付き光ファイバを 高分子繊維アクチュエータの材料としたものです. 外側の高分子被膜が高分子繊維アクチュエータとして, 内側の光ファイバがセンサとして働きます. この構造により,アクチュエータ駆動中の温度や変位の計測が コンパクトに実現できます.
- 運動変換機構
-
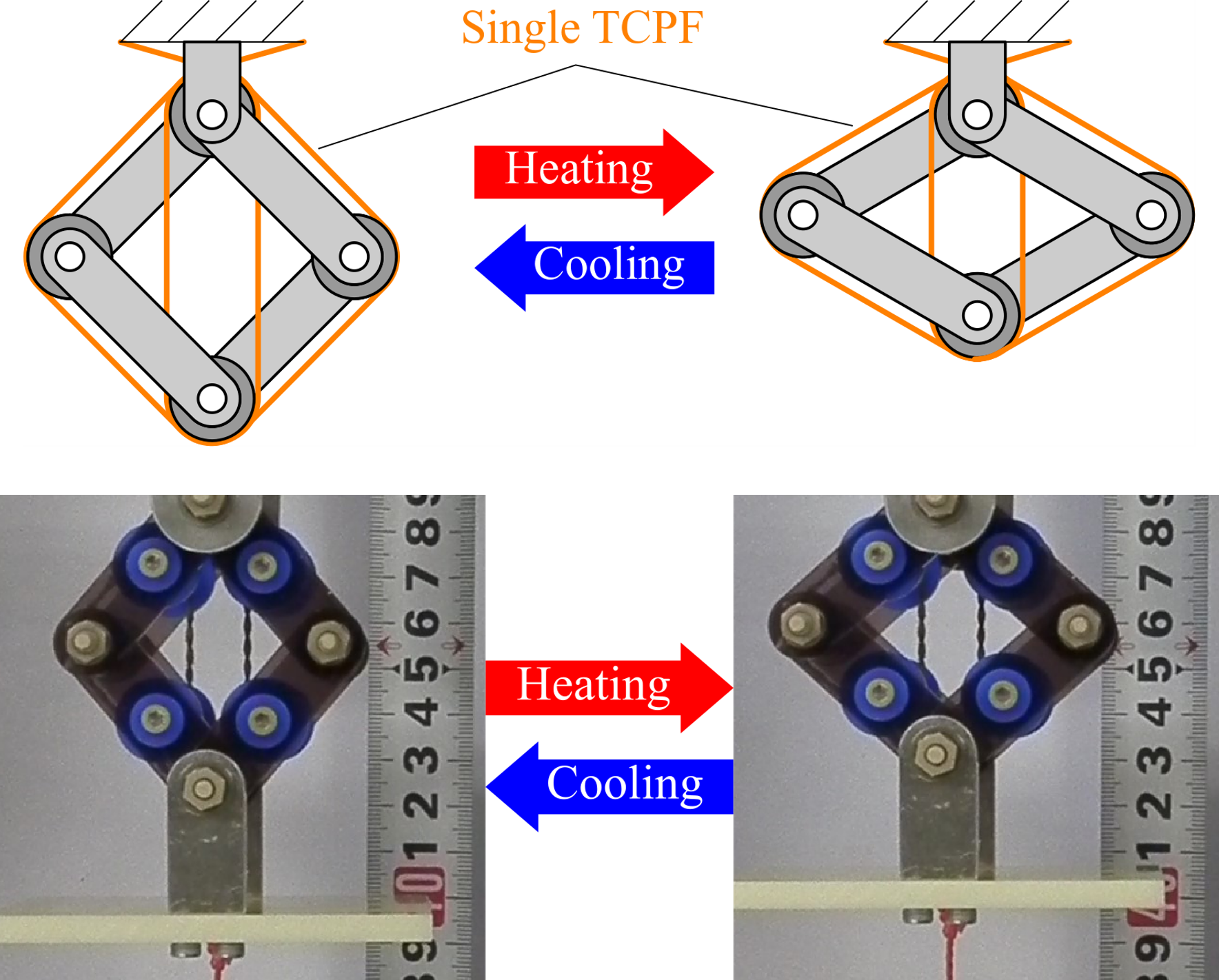
ソフトアクチュエータをロボットへ利用するとき, ソフトアクチュエータの力などを所望のものに変換する必要があります. 本研究室で開発したワイヤ収納型パンタグラフ機構(WISP)は, 高分子繊維アクチュエータのようなワイヤ状のソフトアクチュエータのための運動変換機構です. WISPでは,パンタグラフの周囲と内側にソフトアクチュエータを巻きつけることにより, ひずみと力を増幅することができます.
装着型ロボット
装着箇所のずれを許容したロボット機構開発
装着型ロボットを利用する際,装着箇所のずれがあると,装着者にとって痛みや違和感の原因となりえます.
本研究室では,この問題に対して,装着箇所のずれが生じたとしても,目的とする角度でアシストできる機構の開発に取り組んでいます.
柔軟なタイミングベルト