JKA補助事業 2025年度
高い駆動伝達効率をもつ柔軟なタイミングベルトの開発と応用
高い駆動伝達効率をもつ柔軟なタイミングベルトの開発と応用
事業概要
本研究は,高い駆動伝達効率をもちながら多方向に曲げられる柔軟なタイミングベルトの開発を目指すものです.
これまでに,人の近くで動くロボットの軽量性確保のための動力伝達要素が開発されており,
通常のタイミングベルトへ多方向に曲げられる柔軟性を持たせた柔軟なタイミングベルトもまたそのひとつです.
本研究では,柔軟なタイミングベルトの駆動伝達効率向上のための構造設計を行うとともに,
その応用としての遠隔駆動ロボットアームや差動関節機構における駆動伝達性能の検証を行いました.
- 柔軟なタイミングベルトのためのループ状芯材の製作方法の検討
-
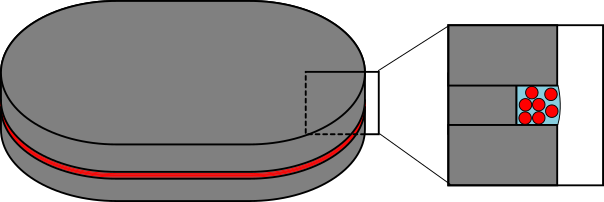
柔軟なタイミングベルトは,芯線としてループ状芯材を有しています. このループ状芯材を上手く作らないと,目標長さの柔軟なタイミングベルトを得ることは困難です. そこで,目標長さと同じ周長の溝に,細い繊維を多重に巻付け,歯と同じ材料で硬化させる方法を開発しました.
舛屋 賢, 神原 龍樹, 江口 智哉, "柔軟タイミングベルトのためのループ状芯材の製作方法の検討", 第43回日本ロボット学会学術講演会予稿集,2Q1-04, 東京, 2025.9.
- 柔軟なタイミングベルトの断面形状の再設計
-

これまでに開発した柔軟なタイミングベルトは,市販のプーリに適合させるために, 四方向に歯をもつ正方形断面形状をしていました. しかし,この形状ではベルトが長手方向にねじれてしまうと伝達性能の変動が生じます, そこで,ねじれを無視できる円形断面形状をもつ柔軟なタイミングベルトを開発しました.
神原 龍樹, 江口 智哉, 舛屋 賢, "柔軟タイミングベルトを用いた2軸差動関節のトルク伝達性能向上" 第26回計測自動制御学会システムインテグレーション部門講演会予稿集,1A5-06, 広島, 2025.12. SI2025優秀講演賞受賞
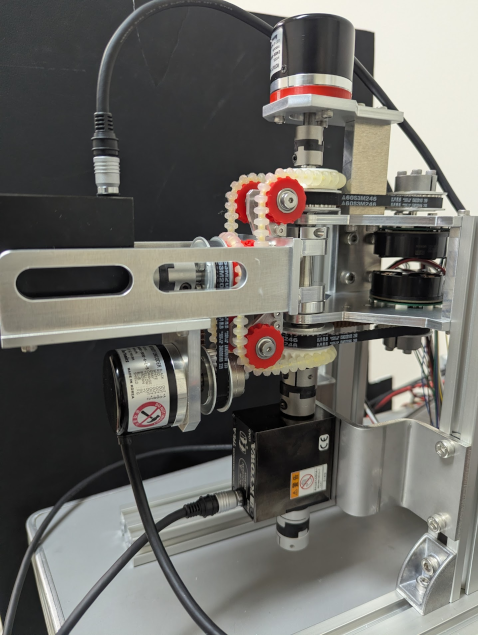
- 柔軟なタイミングベルトを用いた遠隔駆動ロボットアーム
-
柔軟なタイミングベルトのひとつの応用先は,遠隔駆動ロボットアームです. これまでに,遠隔駆動ロボットアームにおける角度伝達性能やトルク伝達性能の検証をしています.
江口 智哉, 神原 龍樹, 舛屋 賢, "長大な円形断面柔軟タイミングベルトを用いた遠隔駆動の伝達性能評価" 日本機械学会ロボティクス・メカトロニクス講演会2026, 2P2-G04, 福岡, 2026.6-7.(発表予定)
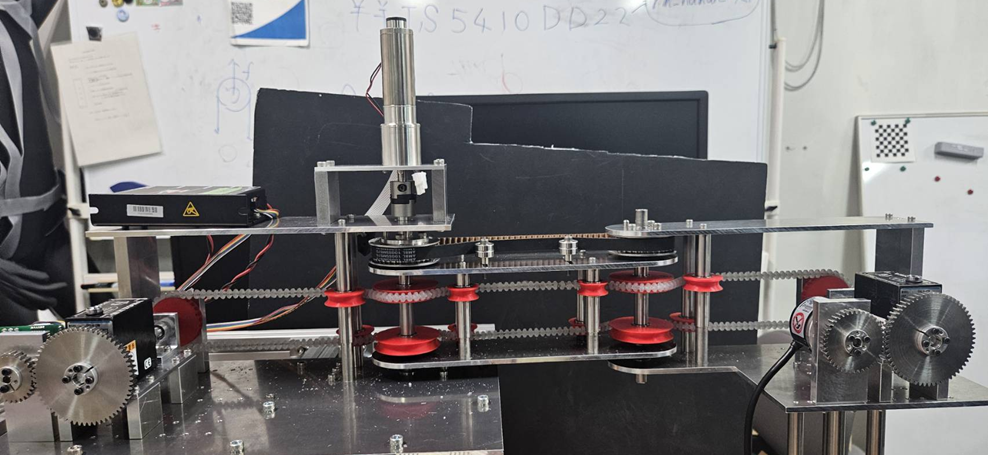
- 柔軟なタイミングベルトを用いた差動関節機構
-
柔軟なタイミングベルトのもうひとつの応用先は,差動関節機構です. これまでに,差動関節機構における角度伝達性能やトルク伝達性能の検証をしています.
神原 龍樹, 江口 智哉, 舛屋 賢, "柔軟タイミングベルトを用いた2軸差動関節のトルク伝達性能向上" 第26回計測自動制御学会システムインテグレーション部門講演会予稿集,1A5-06, 広島, 2025.12. SI2025優秀講演賞受賞

